Intact constitutive models embedded in an encoder-decoder MLP architecture.
If you have accurate material models at the microscale and would like to perform computational homogenization, those same models can be directly embedded into a hybrid architecture to make macroscale predictions.
Because the models in the architecture are the exact same as in the micromodel, a number of features can be directly inherited and therefore not learned from data:
- Path dependency (loading/unloading/reloading) without training for it
- Strain rate dependency while training with only a single rate
- Consistent step size dependence (independent for inviscid models; correct dependence for viscous models)
- Between
$10\times$ and$100\times$ less training data than RNNs for comparable performance

-
You can quickly try out our demo notebook directly in Google Colab.
-
For >10x faster training and inference times, try this JAX-based PRNN implementation.
-
MA Maia, IBCM Rocha, P Kerfriden, FP van der Meer (2023), PRNNs for 2D composites, elastoplastic
-
MA Maia, IBCM Rocha, FP van der Meer (2024), PRNNs for 3D composites, finite-strain thermoviscoplasticity, creep and fatigue
-
N Kovacs, MA Maia, IBCM Rocha, C Furtado, PP Camanho, FP van der Meer (2025), PRNNs for micromodels including distributed cohesive damage
-
MA Maia, IBCM Rocha, D Kovacevic, FP van der Meer (2025), Reproducing creep and fatigue experiments in thermoplastics using PRNNs
-
E Ghane, MA Maia, IBCM Rocha, M Fagerstrom, M Mirkhalaf (2025), Hierarchical PRNNs for three-scale simulations
-
N Kovacs, IBCM Rocha, FP van der Meer, C Furtado, PP Camanho (2025), PRNNs for multiscale uncertainty quantificatoin
The code in this repository contains a standalone demonstration of PRNNs for a 2D micromodel with
-
prnn-demo.ipynb: Jupyter notebook with a few ready-to-run examples. START HERE! -
J2Tensor_vect.py: a simple$J_2$ plasticity model in plane stress. This code comes directly from an FE package, demonstrating how PRNNs can embed existing material models with little to no changes in code; -
prnn.py: A PyTorch network class that implements the PRNN, with single-layer encoder and decoder; -
rnn.py: Implements GRU and LSTM networks with variational Gaussian dropout. For comparing predictions and learning performance with PRNNs; -
utils.py: Implements a custom dataset class for handling stress and strain paths, and a class for training and evaluating networks, with the ability of saving and loading checkpoints; -
pyprnn.yml: Conda environment file that should take care of all dependencies for running the code.
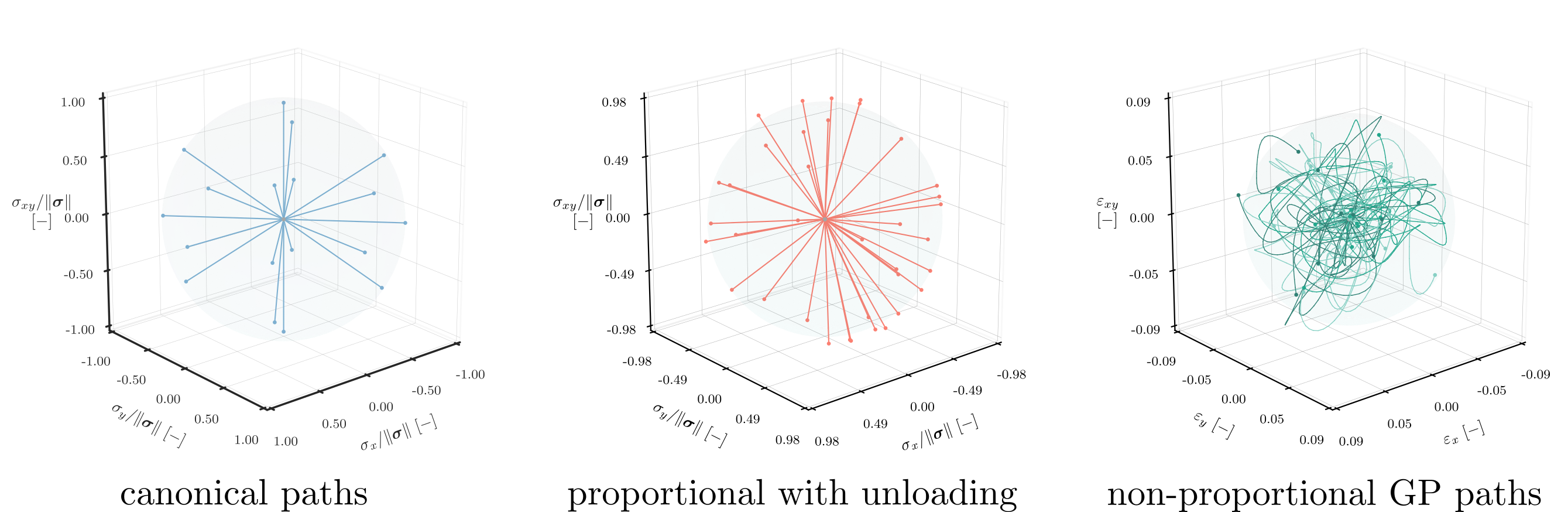
The demonstration notebook also provides three different types of strain path for training, validation and testing:
- A set of 18 canonical paths, comprising uniaxial and biaxial combinations of tension/compression and shear. This dataset is made to mimic traditional fitting of constitutive models. PRNNs already perform remarkably well even when trained only on these simple paths;
- A set of 100 proportional paths in random directions in stress space containing a single unloading-reloading cycle;
- A set of 100 non-proportional GP paths, sampled from suitable Gaussian Process priors and designed to be as general as possible.